说明:
理解摄像头驱动需要四个前提:
1)摄像头基本的工作原理和S5PC100集成的Camera控制器的工作原理
2)platform_device和platform_driver工作原理
3)Linux内核V4L2驱动架构
4)Linux内核I2C驱动架构
1. 摄像头工作原理
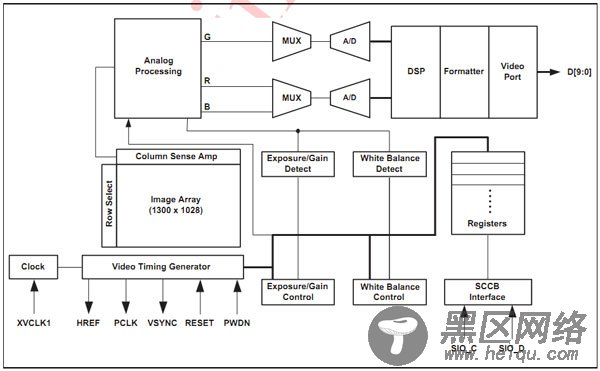
OV9650/9655是CMOS接口的图像传感器芯片,可以感知外部的视觉信号并将其转换为数字信号并输出。通过下面的框图可以清晰的看到它的工作原理:
我们需要通过XVCLK1给摄像头提供时钟,RESET是复位线,PWDN在摄像头工作时应该始终为低。HREF是行参考信号,PCLK是像素时钟,VSYNC是场同步信号。一旦给摄像头提供了时钟,并且复位摄像头,摄像头就开始工作了,通过HREF,PCLK和VSYNC同步传输数字图像信号。数据是通过D0~D7这八根数据线并行送出的。
OV9650向外传输的图像格式是YUV的格式,YUV是一种压缩后的图像数据格式,它里面还包含很多具体的格式类型,我们的摄像头对应的是YCbCr(8 bits, 4:2:2, Interpolated color).一定要搞清楚格式,后面的驱动里面设置的格式一定要和这个格式一致。
OV9650里面有很多寄存器需要配置,配置这些寄存器就需要通过芯片里面的SCCB总线去配置。SCCB其实是一种弱化的I2C总线。我们可以直接把摄像头接在S5PC100的I2C控制器上,利用I2C总线去读写寄存器,当然直接使用GPIO模拟I2C也可以实现读写。我们的驱动代码里两种操作模式都实现了。
从OV9650采集过来的数据没法直接交给CPU处理。S5PC100芯片里面集成了Camera控制器,叫FIMC(Fully Interactive Mobile Camera)。摄像头需要先把图像数据传给控制器,经过控制器处理(裁剪拉升后直接预览或者编码)之后交给CPU处理。
实际上摄像头工作需要的时钟也是FIMC给它提供的。
2. 驱动开发思路
因为驱动程序是承接硬件和软件的桥梁,因此开发摄像头驱动我们要搞清楚两方面的内容:第一是摄像头的硬件接口,也就是它是怎么和芯片连接的,如何控制它,如何给摄像头复位以及传送数据的格式等等;第二是摄像头的软件接口,Linux内核里面摄像头属于标准的V4L2设备,但是这个摄像头只是一个传感器,具体的操作都需要通过FIMC来控制,这看起来关系比较复杂。
相比较而言,硬件接口容易搞懂,通过读芯片手册和原理图基本上就没有问题了,软件接口比较复杂,主要中间有一个Camera控制器。下面主要集中分析软件接口。