
对于任何一个硬件模块的设计,首先第一步都是要先了解硬件本身后,再开始程序的软件设计。而由于DM9000的芯片文档内容很多,要驱动好网卡,需要很长时间,特别对于新手比较困难,所以可以参考linux内核代码中的网卡驱动程序,将其移植到裸机程序当中。下面将就ok6410,介绍DM9000裸机程序驱动的详细过程,并且完成arp协议的程序设计。
1. DM9000硬件接口

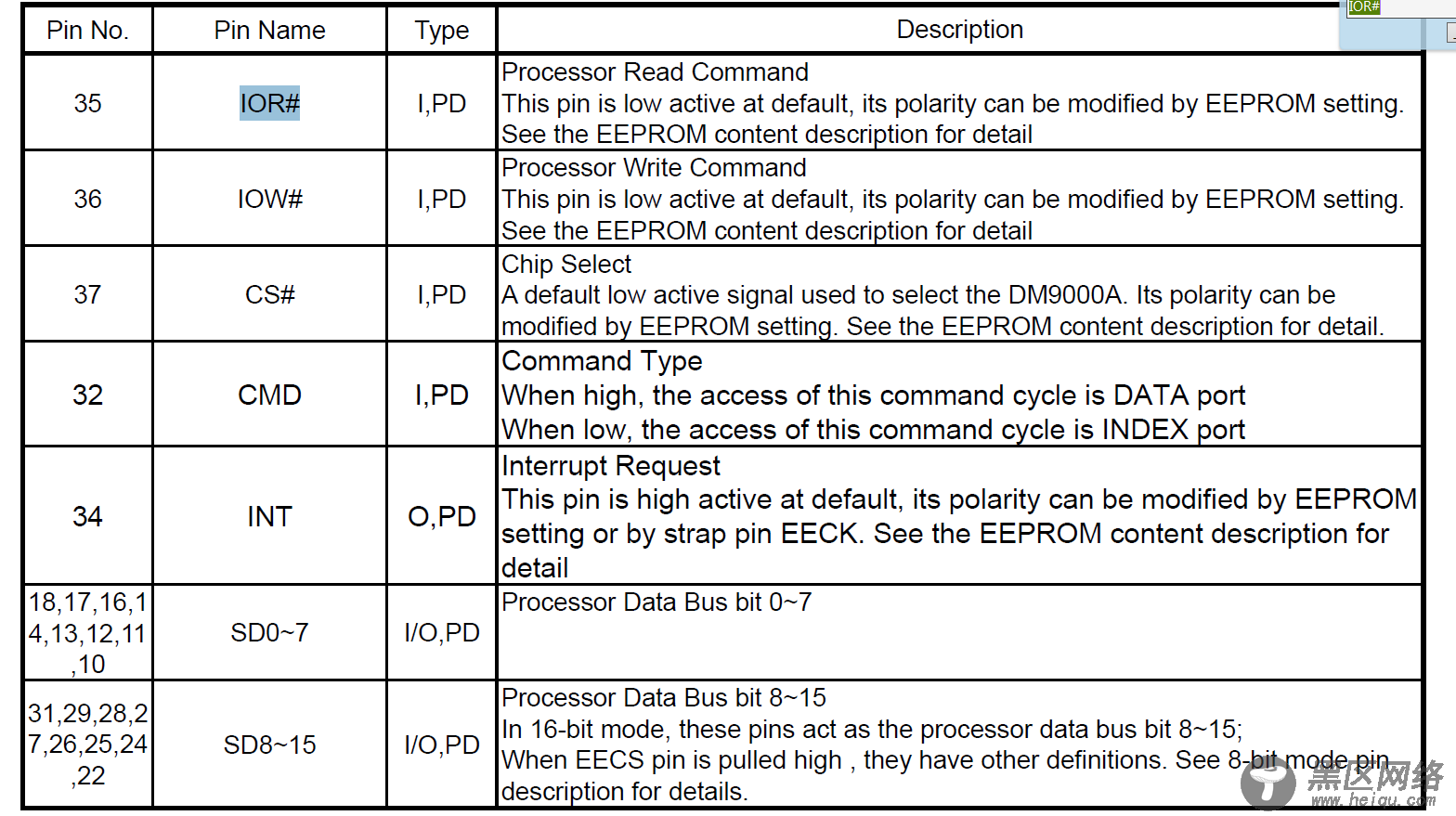
打开ok6410的底板原理图可以看到DM9000和ok6410的硬件接口,通过DM9000的文档大概浏览可知一些比较重要的引脚接口,如图:
再参考ok6410的核心板原理图可以很清楚的知道硬件接口对应的管脚:
SD0~SD15:DATA0~DATA15:XM0DATA0~XM0DATA15
CMD:ADDR2:XM0ADDR2
INT:IRQ_LAN:GPN7
IOR:OEN:XM0OEN
IOW:WEN:XM0WEN
CS:CSN1:XM0CSN1
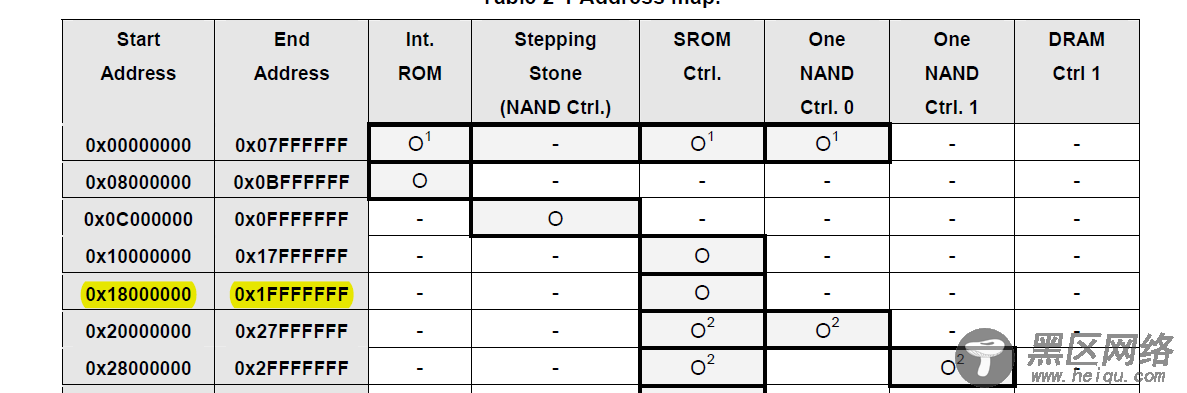
从上面一些管脚的对应关系,可能很难理解控制的方式,这和GPIO等一些模块的裸机程序时有很大的不同。在6410芯片手册中搜索关键字,对于初学者,也很难了解到各个引脚的关系。但是通过网上的资料还是可以知道DM9000接口,接在了ROM1的控制模块中,ok6410并没有接ROM。这样就可以很清楚的知道以下的关系
DATA0~DATA15:ROM1的数据总线
ADDR2:ROM1的地址总线的第二位
IRQ_LAN:中断接口
OEN:nOE
WEN:nWE
CSN1:XM0CSn
这样对DM9000模块的读写相当于对ROM的读写了,关键的是CMD的引脚即ADDR2。
当CMD为1时DATA0~DATA15为数据总线
当CMD为0时DATA0~DATA15为地址总线。
通过ok6410手册可以得出ROM1的起始地址为:0x18000000
2. DM9000程序设计
2.1 初始化读写时序
通过时序图配置以下寄存器
void cs_init()
{
SROM_BW &= (~(0xf<<4));
SROM_BW |= (0x1<<4);
SROM_BC1 =(0<<0)|(0x2<<4)|(0x2<<8)|(0x2<<12)|(0x2<<16)|(0x2<<24)|(0x2<<28);
}
2.2 读写操作函数
#define DM_ADD (*((volatile unsigned short *)0x18000000))
#define DM_DAT (*((volatile unsigned short *)0x18000004))
void dm9000_reg_write(u16 reg,u16 data)
{
DM_ADD = reg;
DM_DAT = data;
}
u8 dm9000_reg_read(u16 reg)
{
DM_ADD = reg;
return DM_DAT;
}
由硬件接口分析可知CMD即ROM1的地址总线的第二位,为1时为数据总线,为0是为地址总线,从而可以按上宏定义进行读写。
2.3 DM9000初始化
参考linux内核的DM9000驱动程序,可以清楚了解初始化的具体步骤
void dm9000_reset()
{
dm9000_reg_write(DM9000_GPCR, GPCR_GPIO0_OUT);
dm9000_reg_write(DM9000_GPR, 0);
dm9000_reg_write(DM9000_NCR, (NCR_LBK_INT_MAC | NCR_RST));
dm9000_reg_write(DM9000_NCR, 0);
dm9000_reg_write(DM9000_NCR, (NCR_LBK_INT_MAC | NCR_RST));
dm9000_reg_write(DM9000_NCR, 0);
}
void dm9000_probe(void)
{
u32 id_val;
id_val = dm9000_reg_read(DM9000_VIDL);
id_val |= dm9000_reg_read(DM9000_VIDH) << 8;
id_val |= dm9000_reg_read(DM9000_PIDL) << 16;
id_val |= dm9000_reg_read(DM9000_PIDH) << 24;
if (id_val == DM9000_ID)
{
printf("dm9000 is found !\n");
return ;
}
else
{
printf("dm9000 is not found !\n");
return ;
}
}
void dm9000_init()
{
u32 i;
//设置片选
cs_init();
//复位设备
dm9000_reset();
//捕获dm9000
dm9000_probe();
//MAC初始化
//Program operating register, only internal phy supported
dm9000_reg_write(DM9000_NCR, 0x0);
//TX Polling clear
dm9000_reg_write(DM9000_TCR, 0);
//Less 3Kb, 200us
dm9000_reg_write(DM9000_BPTR, BPTR_BPHW(3) | BPTR_JPT_600US);
// Flow Control : High/Low Water
dm9000_reg_write(DM9000_FCTR, FCTR_HWOT(3) | FCTR_LWOT(8));
//SH FIXME: This looks strange! Flow Control
dm9000_reg_write(DM9000_FCR, 0x0);
//Special Mode
dm9000_reg_write(DM9000_SMCR, 0);
//clear TX status
dm9000_reg_write(DM9000_NSR, NSR_WAKEST | NSR_TX2END | NSR_TX1END);
// Clear interrupt status
dm9000_reg_write(DM9000_ISR, ISR_ROOS | ISR_ROS | ISR_PTS | ISR_PRS);
//填充MAC地址
for (i = 0; i < 6; i++)
dm9000_reg_write(DM9000_PAR+i, macc_addr[i]);
//激活DM9000
dm9000_reg_write(DM9000_RCR, RCR_DIS_LONG | RCR_DIS_CRC | RCR_RXEN);
//Enable TX/RX interrupt mask
dm9000_reg_write(DM9000_IMR, IMR_PAR);
}
2.4 DM9000发送函数
void dm9000_tx(u8 *data,u32 length)
{
u32 i;
//禁止中断
dm9000_reg_write(DM9000_IMR,0x80);
//写入发送数据的长度
dm9000_reg_write(DM9000_TXPLL, length & 0xff);
dm9000_reg_write(DM9000_TXPLH, (length >> 8) & 0xff);
//写入待发送的数据
DM_ADD = DM9000_MWCMD;
for(i=0;i
{
DM_DAT = data[i] | (data[i+1]<<8);
}
//启动发送
dm9000_reg_write(DM9000_TCR, TCR_TXREQ);
//等待发送结束
while(1)
{
u8 status;
status = dm9000_reg_read(DM9000_TCR);
if((status&0x01)==0x00)
break;
}
//清除发送状态
dm9000_reg_write(DM9000_NSR,0x2c);
//恢复中断使能
dm9000_reg_write(DM9000_IMR,0x81);
}
2.5 DM9000接收函数
#define PTK_MAX_LEN 1522
u32 dm9000_rx(u8 *data)
{
u8 status,len;
u16 tmp;
u32 i;
//判断是否产生中断,且清除
if(dm9000_reg_read(DM9000_ISR) & 0x01)
dm9000_reg_write(DM9000_ISR,0x01);
else
return 0;
//空读
dm9000_reg_read(DM9000_MRCMDX);
//读取状态
status = dm9000_reg_read(DM9000_MRCMD);
//读取包长度
len = DM_DAT;
//读取包数据
if(len
{
for(i=0;i
{
tmp = DM_DAT;
data[i] = tmp & 0x0ff;
data[i+1] = (tmp>>8)&0x0ff;