2014年,苏黎世大学机器人感知组的Forster等人提出开源的SVO系统[16],该系统对稀疏的特征块使用直接法配准(Sparse Model-based Image Alignment),获取相机位姿,随后根据光度不变假设构造优化方程对预测的特征位置进行优化(Feature Alignment),最后对位姿和结构进行优化(Motion-only BA和Structure-only BA),而在深度估计方面,构造深度滤波器,采用一个特殊的贝叶斯网络[17]对深度进行更新。SVO的一个突出优点就是速度快,由于使用了稀疏的图像块,而且不需要进行特征描述子的计算,因此它可以达到很高的速度(作者在无人机的嵌入式ARM Cortex A9 4核1.6Ghz处理器平台上可以达到55fps的速度),但是SVO缺点也很明显,它没有考虑重定位和闭环,不算是一个完整意义上的SLAM系统,丢失后基本就挂了,而且它的Depth Filter收敛较慢,结果严重地依赖于准确的位姿估计;2016年,Forster对SVO进行改进,形成SVO2.0[18]版本,新的版本做出了很大的改进,增加了边缘的跟踪,并且考虑了IMU的运动先验信息,支持大视场角相机(如鱼眼相机和反射式全景相机)和多相机系统,该系统目前也开源了可执行版本[19];值得一提的是,Foster对VIO的理论也进行了详细的推导,相关的文献[20]成为后续SLAM融合IMU系统的理论指导,如后面的Visual Inertial ORBSLAM等系统。
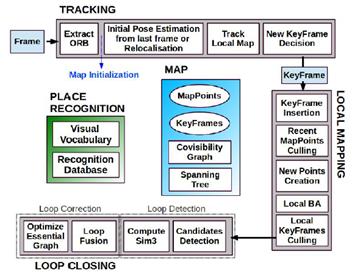
2015年,Mur-Artal 等提出了开源的单目ORB-SLAM[21],并于2016年拓展为支持双目和RGBD传感器的ORB-SLAM2[22],它是目前支持传感器最全且性能最好的视觉SLAM系统之一,也是所有在KITTI数据集上提交结果的开源系统中排名最靠前的一个[23]。ORB-SLAM 延续了PTAM 的算法框架,增加了单独的回环检测线程,并对框架中的大部分组件都做了改进,归纳起来主要有以下几点:1)ORB-SLAM追踪、建图、重定位和回环检测各个环节都使用了统一的ORB 特征[24],使得建立的地图可以保存载入重复利用;2)得益于共视图(convisibility graph)的使用,将跟踪和建图操作集中在一个局部互见区域中,使其能够不依赖于整体地图的大小,能够实现大范围场景的实时操作;3)采用统一的BoW词袋模型进行重定位和闭环检测,并且建立索引来提高检测速度;4)改进了PTAM只能手工选择从平面场景初始化的不足,提出基于模型选择的新的自动鲁棒的系统初始化策略,允许从平面或非平面场景可靠地自动初始化。后来,Mur-Artal又将系统进行了拓展,形成了融合IMU信息的Visual Inertial ORB-SLAM[25],采用了Foster的论文[]提出的预积分的方法,对IMU的初始化过程和与视觉信息的联合优化做了阐述。
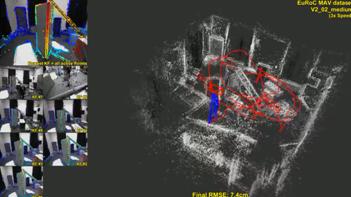
2016年,LSD-SLAM的作者,TUM机器视觉组的Engel等人又提出了DSO系统[26]。该系统是一种新的基于直接法和稀疏法的视觉里程计,它将最小化光度误差模型和模型参数联合优化方法相结合。为了满足实时性,不对图像进行光滑处理,而是对整个图像均匀采样。DSO不进行关键点检测和特征描述子计算,而是在整个图像内采样具有强度梯度的像素点,包括白色墙壁上的边缘和强度平滑变化的像素点。而且,DSO提出了完整的光度标定方法,考虑了曝光时间,透镜晕影和非线性响应函数的影响。该系统在TUM monoVO、EuRoC MAV和ICL-NUIM三个数据集上进行了测试,达到了很高的跟踪精度和鲁棒性。
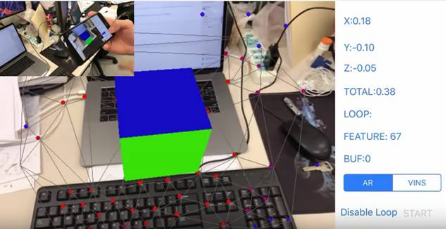
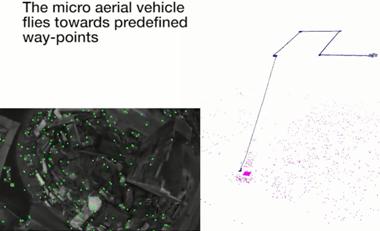
2017年,香港科技大学的沈绍劼老师课题组提出了融合IMU和视觉信息的VINS系统[27],同时开源手机和Linux两个版本的代码,这是首个直接开源手机平台代码的视觉IMU融合SLAM系统。这个系统可以运行在iOS设备上,为手机端的增强现实应用提供精确的定位功能,同时该系统也在应用在了无人机控制上,并取得了较好的效果。VINS-Mobile使用滑动窗口优化方法,采用四元数姿态的方式完成视觉和IMU融合,并带有基于BoW的闭环检测模块,累计误差通过全局位姿图得到实时校正。