首先调用V4L2Camera的GrabRawFrame函数,通过V4L2驱动取得Camera采集的一帧数据,将该帧数据放到指定缓冲区中;
其次将取得的原始数据通过数据格式转化函数convert,将采集到得原始数据转化成与Preview Buffer注册类型相一致的数据类型,也就是RGB565。在我们的系统中,Camera hardware采集的原始数据时YUYV(YUV4:2:2)格式的。所以我们必须将YUYV格式的原始数据转化为RGB565格式的数据,然后放到PreviewBuffer中。
最后,通过回调函数,向CameraService发送Preview消息CAMERA_MSG_PREVIEW_FRAME,CameraService收到该消息之后调用Preview处理函数handlePreviewData,通过调用postBuffer函数,最终由SurfaceFlinger完成对PreviewBuffer的Draw工作。
void CameraService::Client::handlePreviewData(const sp<IMemory>& mem) { ssize_t offset,size; sp<IMemoryHeap> heap = mem->getMemory(&offset, &size); if (!mUseOverlay) { Mutex::Autolock surfaceLock(mSurfaceLock); if (mSurface != NULL) { mSurface->postBuffer(offset); } } int flags = mPreviewCallbackFlag; if (!(flags & FRAME_CALLBACK_FLAG_ENABLE_MASK)) { LOGV("frame callback is diabled"); return; } …….. }
如上所示,HAL层将数据投递到framebuffer中,然后通知CameraService调用postBuffer对数据进行显示。Preview模式下,底层并不需要向上层AP通知自己的状态,所以postBuffer之后直接返回不再向上通知CAMERA_MSG_PREVIEW_FRAME消息。
(2)Camera TakePicture Image Display
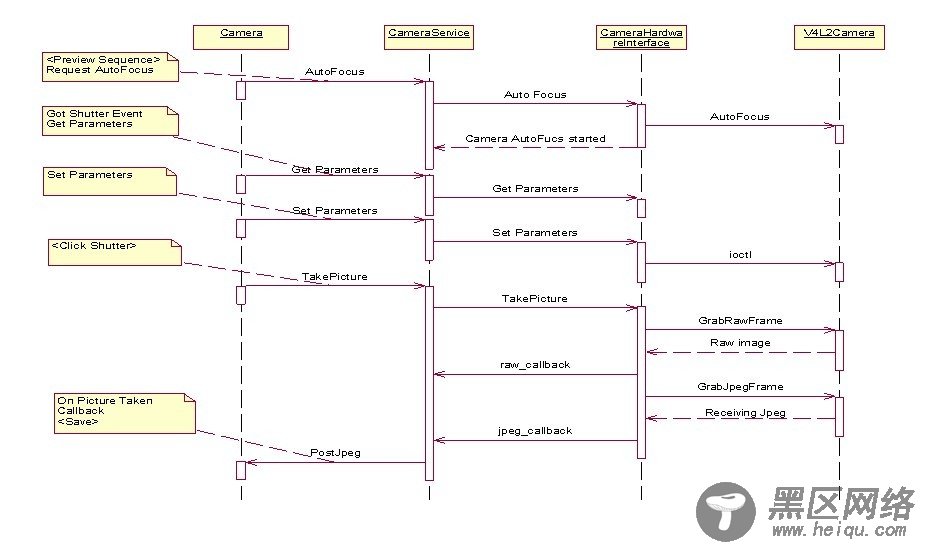
在Preview模式下,通过ClickShutterButton,Camera由Previw模式进入TakePicture模式。在进入TakePicture模式之前,需要关闭Camera的预览功能,即停止Camera Preview Display。在TakePicture模式下,AP层首先会发送一个Focus请求,Focus请求会直接到达CameraHardware层,CameraHardware调用底层硬件提供的接口完成Focus功能。并通过回调函数notify,发送CAMERA_MSG_FOCUS消息,完成Focus,在完成Focus之前,系统并不会停止Preview Display,只有上层接到底层返回的FOCUS成功消息之后,才真正的进入TakePicture模式。在进入TakePicture之后,Camera主要完成三个功能。
int CameraHardware::pictureThread() { int width, height; if (mMsgEnabled & CAMERA_MSG_SHUTTER) { ①mNotifyFn(CAMERA_MSG_SHUTTER, 0, 0, mUser); } mParameters.getPictureSize(&width, &height); ②mCamera.GrabRawFrame(mHeap->getBase()); if (mMsgEnabled & CAMERA_MSG_RAW_IMAGE) { ②mCamera.convert((unsigned char *)mHeap->getBase(), (uint8_t *)mRawHeap->getBase(), width, height); ②mDataFn(CAMERA_MSG_RAW_IMAGE, mRawBuffer,mUser); } if (mMsgEnabled & CAMERA_MSG_COMPRESSED_IMAGE) { ③mDataFn(CAMERA_MSG_COMPRESSED_IMAGE, camera.GrabJpegFrame(mHeap->getBase()),mUser); } return NO_ERROR; }
Step1:上层通过调用takepicture函数,最终通过Camera HAL层的CameraHardware启动captureThread线程,启动Capture线程之后,CameraHardware在第一时间会通过回调函数notify,向上发送CAMERA_MSG_SHUTTER消息给CameraService,同时CameraService将该消息返回给上层AP。
void CameraService::Client::handleShutter(image_rect_type *size) { // Play shutter sound. …… // Screen goes black after the buffer is unregistered. if (mSurface != 0 && !mUseOverlay) { mSurface->unregisterBuffers(); } sp<ICameraClient> c = mCameraClient; if (c != NULL) { c->notifyCallback(CAMERA_MSG_SHUTTER, 0, 0); } mHardware->disableMsgType(CAMERA_MSG_SHUTTER); if (mSurface != 0 && !mUseOverlay) { int width, height; CameraParameters params(mHardware->getParameters()); width = size->width; height = size->height; ISurface::BufferHeap buffers(width, height, width, height, PIXEL_FORMAT_RGB_565, mOrientation, 0, mHardware->getRawHeap()); mSurface->registerBuffers(buffers); IPCThreadState::self()->flushCommands(); } }
如上图所示,CameraService收到CAMERA_MSG_SHUTTER消息之后,首先通过回调函数,将该消息再转发给上层AP,然后根据Picture大小调用ISurface注册用于Capture Image Display的Capture Image Display Buffer。
Step2:CameraHardware开始真正的Capture Frame,首先调用底层GrabRawFrame函数获取Capture Image Frame,接下来要完成两件事:
一是将获取的原始Capture Frame数据转化为与显示缓冲区一直的数据格式,然后将转化后的数据投递到之前注册的Capture Image Display缓冲区中。
二是通过回调函数,向CameraService发送Capture Image Display消息CAMERA_MSG_RAW_IMAGE,CameraService收到该消息之后调用RawPicture处理函数handleRawPicture,通过调用postBuffer函数,最终由SurfaceFlinger完成对RawBuffer的Draw工作。
void CameraService::Client::handleRawPicture(const sp<IMemory>& mem) { ssize_t offset; size_t size; sp<IMemoryHeap> heap = mem->getMemory(&offset, &size); // Put the YUV version of the snapshot in the preview display. if (mSurface != 0 && !mUseOverlay) { mSurface->postBuffer(offset); } sp<ICameraClient> c = mCameraClient; if (c != NULL) { c->dataCallback(CAMERA_MSG_RAW_IMAGE, mem); } mHardware->disableMsgType(CAMERA_MSG_RAW_IMAGE); }
private final class RawPictureCallback implements PictureCallback {
public void onPictureTaken(
byte [] rawData, Android.hardware.Camera camera) {
mRawPictureCallbackTime = System.currentTimeMillis();
}
}
与Preview消息不同的是,CameraService会将该消息继续发给上层AP,上层针对该消息会做一些简单的处理,主要是记录消息到达的系统时间。