本篇文章主要讲了与串口编程相关的几个知识点,以及在Linux上编写串口程序所要遵循的思想和要考虑的方面,以及它和我们之前在UC/OS操作系统上编写串口程序有什么区别。
一.串口相关的几个基本概念
可以结合《串口编程之前奏篇》中的知识点会对串口的一些基本概念有更深的了解,为后面的继续深入做铺垫。
1. 波特率
1> 表示每秒传输的比特数。
2> 说明:若波特率为115200,它表示什么呢?
Ø 对于发送断,即每秒钟发送115200bit。
Ø 对于接收端,115200波特率意味着串口通信在数据线上的采样率为115200HZ.
注:波特率和距离之间成反比,距离相隔很近的设备之间可以实现高波特率通信。
2. 数据位
1> 表示通信中实际数据位的参数。在计算机发送的数据包中,实际的数据往往不会是8位。
2> 说明:在串口通信中,可以选择5,6,7,8位。设定数据位时,主要考虑所要传输的数据内容。
3> 事例:如果要传输的是标准的ASCII码。那么又该如何设定数据位呢?
Ø 由于ASCII码的范围是0~127,因此设定数据位为7就OK了。
Ø 若为扩展ASCII码,其范围是0~255,必须使用8位。
注:7位或8位数据中不仅仅是数据,还包括开始/停止位,数据位以及奇偶校验位等。
3. 奇偶校验位
1> 作用:该位用于串口通信中的简单检验错。
2> 类型:主要有偶校验,奇校验,标记,空格的方式
在ARM7(LPC2200)中,只有偶校验,奇校验两种方式。
3> 方法:如何进行校验?
Ø 奇偶校验是通过统计数据中高位或低位的个数来实现校验的。
Ø 标记,空格并不是真正校验错误的,只是通过简单的置位来实现对数据的检测。通过置位方式,可以判断出是否存在噪声干扰数据通信或数据传输,以及是否存在不同步的现象
4. 停止位
1> 作用:停止位用于标志该数据包数据结束,可以取1位,1.5位或2位。
在ARM7(lpc2200中)停止位可以取1位,2位或不取
2> 说明:
Ø 停止位不仅仅用于数据包的传输结束标志,还提供了计算机之间校正同步时钟的机会。
Ø 用于停止位的位数越多,不同时钟同步的容忍程序越大。
Ø 但是由于停止位占用了数据空间,过多的停止位将导致数据传输速度的下降。
5. 数据流控制
1> 通过串口传输数据时,由于计算机之间处理速度或其他因素的影响,会造成丢失数据的现象。
2> 作用:数据流控制用于解决上面的问题,通过控制发送数据的速度,确保数据不会出现丢失。
3> 类型:数据流控制可以分为软件流控制(Xon/Xoff)和硬件流控制,当然你可以选择不使用数据流控制。
Ø 软件流控制使用特殊的字符作为启动或停止的标志
Ø 硬件流控制通过使用硬件信号(CTR/RTS)来实现。
注:使用硬件流控制时,在接收端准备好接收数据后,设为CTS为1,否则CTS为0。同样,如果发送端准备好要发送数据时,则设定RTS为1;如果还未准备好,设置CTS为0.
二. Linux串口下编程所要考虑的问题
1. Linux下编写串口程序的思想
看图:
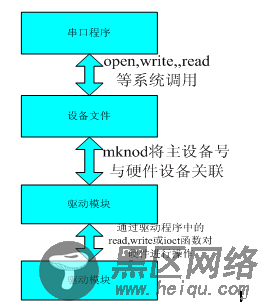
1> 在Linux中,一切设备皆为文件。因此对串口的操作都转化为对文件的操作。
(在Ucos-II操作系统中是直接对寄存器操作来对串口进行编程的)
2> Linux设备驱动工作流程:
Ø 在Linux系统启动时,设备驱动将被加载。
Ø 设备驱动成功加载后,将向系统反馈一个主设备号,驱动程序将根据该主设备号在/dev目录下创建对应的设备文件。
Ø 程序(进程)就可以使用open,read,write函数或命令来实现对设备的访问了。
Tiger-John说明:
在linux中,系统对上层程序人员把底层对寄存器的操作屏蔽了,提供了统一的ARI接口。我们只要通过这些统一的接口(open,write,read)来对UART0串口进行操作。
UART0串口编程目录: