
AbstractQueuedSynchronizer (抽象队列同步器,以下简称 AQS)出现在 JDK 1.5 中,由大师 Doug Lea 所创作。AQS 是很多同步器的基础框架,比如 ReentrantLock、CountDownLatch 和 Semaphore 等都是基于 AQS 实现的。除此之外,我们还可以基于 AQS,定制出我们所需要的同步器。
AQS 的使用方式通常都是通过内部类继承 AQS 实现同步功能,通过继承 AQS,可以简化同步器的实现。如前面所说,AQS 是很多同步器实现的基础框架。弄懂 AQS 对理解 Java 并发包里的组件大有裨益,这也是我学习 AQS 并写出这篇文章的缘由。另外,需要说明的是,AQS 本身并不是很好理解,细节很多。在看的过程中药有一定的耐心,做好看多遍的准备。好了,其他的就不多说了,开始进入正题吧。
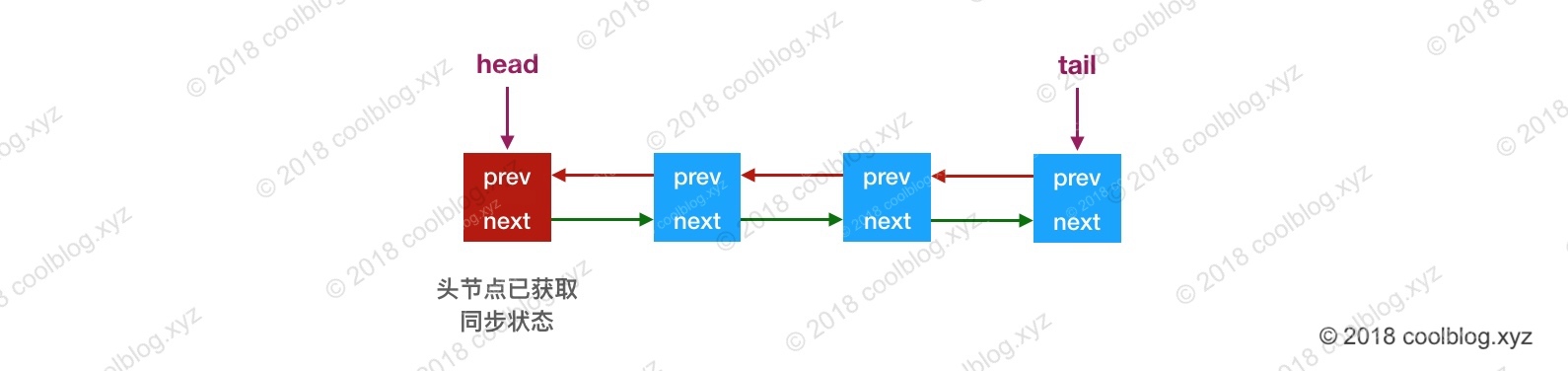
2.原理概述在 AQS 内部,通过维护一个FIFO 队列来管理多线程的排队工作。在公平竞争的情况下,无法获取同步状态的线程将会被封装成一个节点,置于队列尾部。入队的线程将会通过自旋的方式获取同步状态,若在有限次的尝试后,仍未获取成功,线程则会被阻塞住。大致示意图如下:
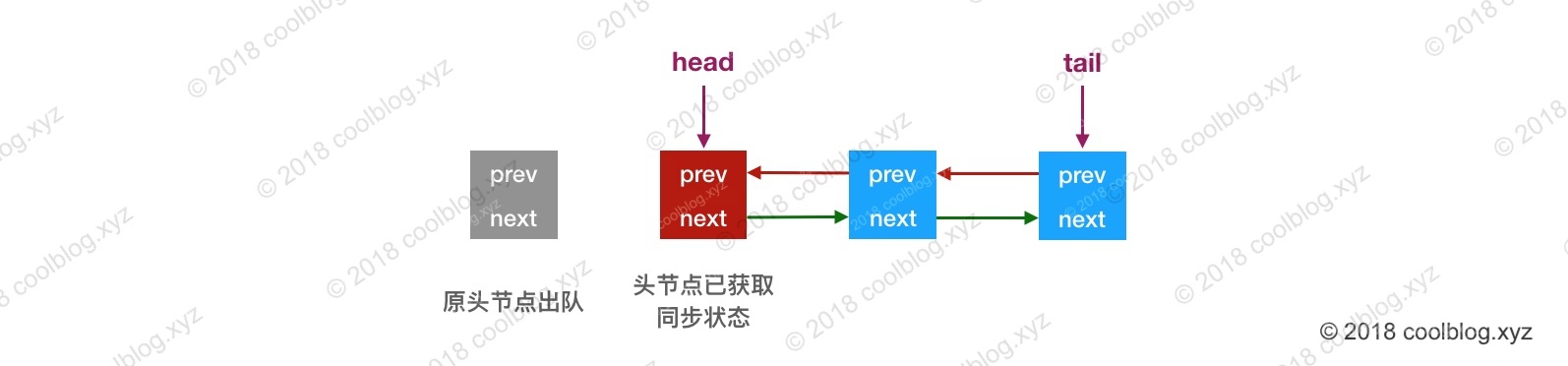
当头结点释放同步状态后,且后继节点对应的线程被阻塞,此时头结点
线程将会去唤醒后继节点线程。后继节点线程恢复运行并获取同步状态后,会将旧的头结点从队列中移除,并将自己设为头结点。大致示意图如下:
本节将介绍三组重要的方法,通过使用这三组方法即可实现一个同步组件。
第一组方法是用于访问/设置同步状态的,如下:
方法 说明int getState() 获取同步状态
void setState() 设置同步状态
boolean compareAndSetState(int expect, int update) 通过 CAS 设置同步状态
第二组方需要由同步组件覆写。如下:
方法 说明boolean tryAcquire(int arg) 独占式获取同步状态
boolean tryRelease(int arg) 独占式释放同步状态
int tryAcquireShared(int arg) 共享式获取同步状态
boolean tryReleaseShared(int arg) 共享式私房同步状态
boolean isHeldExclusively() 检测当前线程是否获取独占锁
第三组方法是一组模板方法,同步组件可直接调用。如下:
方法 说明void acquire(int arg) 独占式获取同步状态,该方法将会调用 tryAcquire 尝试获取同步状态。获取成功则返回,获取失败,线程进入同步队列等待。
void acquireInterruptibly(int arg) 响应中断版的 acquire
boolean tryAcquireNanos(int arg,long nanos) 超时+响应中断版的 acquire
void acquireShared(int arg) 共享式获取同步状态,同一时刻可能会有多个线程获得同步状态。比如读写锁的读锁就是就是调用这个方法获取同步状态的。
void acquireSharedInterruptibly(int arg) 响应中断版的 acquireShared
boolean tryAcquireSharedNanos(int arg,long nanos) 超时+响应中断版的 acquireShared
boolean release(int arg) 独占式释放同步状态
boolean releaseShared(int arg) 共享式释放同步状态
上面列举了一堆方法,看似繁杂。但稍微理一下,就会发现上面诸多方法无非就两大类:一类是独占式获取和释放共享状态,另一类是共享式获取和释放同步状态。至于这两类方法的实现细节,我会在接下来的章节中讲到,继续往下看吧。
4.源码分析 4.1 节点结构在并发的情况下,AQS 会将未获取同步状态的线程将会封装成节点,并将其放入同步队列尾部。同步队列中的节点除了要保存线程,还要保存等待状态。不管是独占式还是共享式,在获取状态失败时都会用到节点类。所以这里我们要先看一下节点类的实现,为后面的源码分析进行简单铺垫。源码如下:
static final class Node { /** 共享类型节点,标记节点在共享模式下等待 */ static final Node SHARED = new Node(); /** 独占类型节点,标记节点在独占模式下等待 */ static final Node EXCLUSIVE = null; /** 等待状态 - 取消 */ static final int CANCELLED = 1; /** * 等待状态 - 通知。某个节点是处于该状态,当该节点释放同步状态后, * 会通知后继节点线程,使之可以恢复运行 */ static final int SIGNAL = -1; /** 等待状态 - 条件等待。表明节点等待在 Condition 上 */ static final int CONDITION = -2; /** * 等待状态 - 传播。表示无条件向后传播唤醒动作,详细分析请看第五章 */ static final int PROPAGATE = -3; /** * 等待状态,取值如下: * SIGNAL, * CANCELLED, * CONDITION, * PROPAGATE, * 0 * * 初始情况下,waitStatus = 0 */ volatile int waitStatus; /** * 前驱节点 */ volatile Node prev; /** * 后继节点 */ volatile Node next; /** * 对应的线程 */ volatile Thread thread; /** * 下一个等待节点,用在 ConditionObject 中 */ Node nextWaiter; /** * 判断节点是否是共享节点 */ final boolean isShared() { return nextWaiter == SHARED; } /** * 获取前驱节点 */ final Node predecessor() throws NullPointerException { Node p = prev; if (p == null) throw new NullPointerException(); else return p; } Node() { // Used to establish initial head or SHARED marker } /** addWaiter 方法会调用该构造方法 */ Node(Thread thread, Node mode) { this.nextWaiter = mode; this.thread = thread; } /** Condition 中会用到此构造方法 */ Node(Thread thread, int waitStatus) { // Used by Condition this.waitStatus = waitStatus; this.thread = thread; } }