
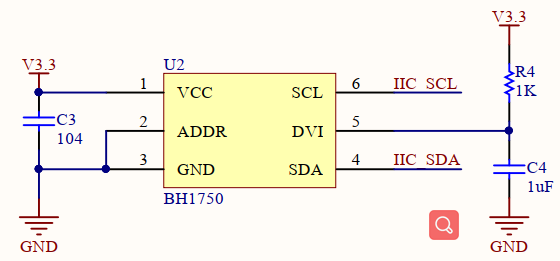
BH1750是一种用于两线制串行总线接口的16位数字型光强度传感器集成电路。利用它的高分辨率可以探测较大范围的光强度变化。(1lx~65535lx)。
在RT-Thread中读取BH1750数据有两种方法:一种方法是借助bh1750软件包;另一种方法是直接使用i2c驱动框架读取BH1750数据。
关于直接使用i2c驱动框架读取BH1750数据的方法可以阅读Mculover666兄的这篇:
https://blog.csdn.net/Mculover666/article/details/104675712
本次实验我们借助bh1750软件包来读取BH1750传感器数据,使用RT-Thread Studio V1.1.0来创建工程。
1、添加bh1750软件包
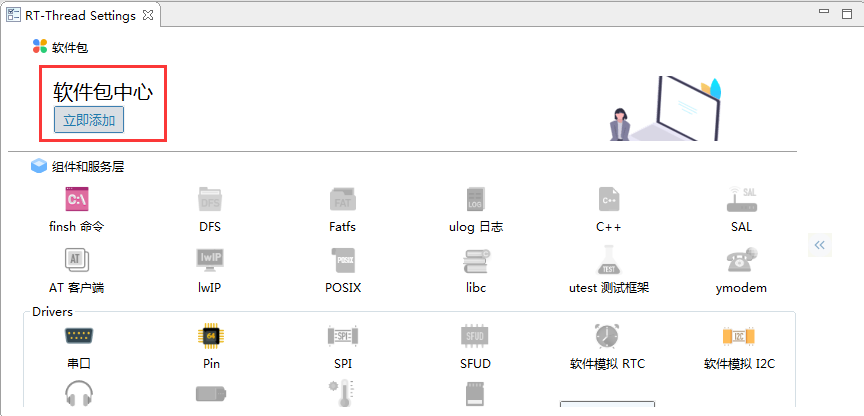


目前只有软件i2c驱动。保存RT-Thread Settings文件。编译报错:

那是因为我们没有打开I2C相关的宏,drv_soft_i2c.c中模拟了几个i2c,我们要确认我们使用哪一个i2c与bh1750传感器相连。
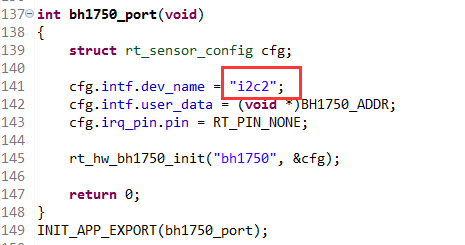
这里可以看到bh1750的示例的初始化函数中使用了i2c2,所以相应的我们需要在board.h中打开i2c2相关的宏,需要打开、修改哪些宏可以看相关注释:

这里我们使用的是小熊派开发板,bh1750与MCU通过PB6、PB7引脚相连:

虽然PB6、PB7可以配置为硬件i2功能,但是我们这里使用的是软件i2c,所以这里的PB6、PB7是当做gpio来用的。然后我们根据注释的说明把代码改为:

然后编译报错,错误提示这几个宏有问题。反反复复检查,好像没什么问题,为啥就会疯狂报错。隐约记得有些例程例程中表示引脚好像不是这么表示的,而是类似这样的:
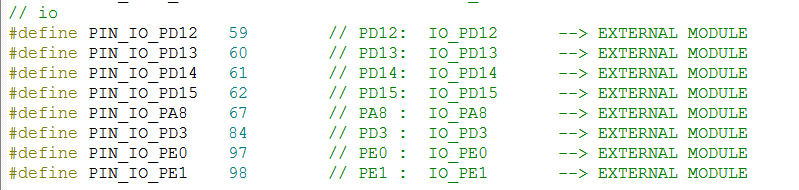
每个引脚都有一个新的代号,而这些引脚与代号的关系可以在drv_gpio.c中查看:

可以看到我们的PB6、PB7引脚的代号分别是22、23。然后尝试着把上面的i2c宏代码改为:
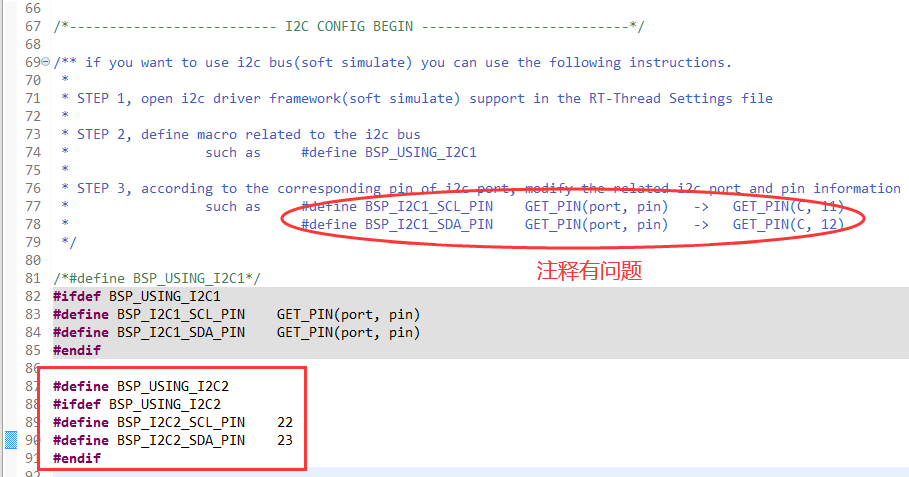
编译成功!然后试着读取传感器数据,也成功了。所以,这大概是RT-Thread Studio V1.1.0的一个小bug,模板工程的board.h里关于i2c的注释有问题,严重误导了我们。。
3、下载、验证
若执行sensor read命令无数据输出时,需要打开\components\drivers\sensors\sensor_cmd.c,在sensor_show_data函数后面自行增加环境光照强度打印代码:
case RT_SENSOR_CLASS_LIGHT: LOG_I("num:%3d, light:%4d.%d, timestamp:%5d", num, sensor_data->data.light / 10, sensor_data->data.light % 10, sensor_data->timestamp); break; 4、编写应用上面能输入那些命令对bh1750进行测试的前提是官方已经给我们写好了相关应用demo,在sensor_cmd.c中,如:
(1)测试函数

除此之外还有其它几个应用相关的函数。
我们也可以模仿sensor_cmd.c里面的代码来写我们自己的应用代码:
static void bh1750_thread_entry(void *parameter) { rt_device_t dev = RT_NULL; struct rt_sensor_data data; rt_size_t res; /* 查找bh1750传感器 */ dev = rt_device_find("li_bh1750"); if (dev == RT_NULL) { rt_kprintf("Can't find device:li_bh1750\n"); return; } /* 以只读模式打开bh1750 */ if (rt_device_open(dev, RT_DEVICE_FLAG_RDONLY) != RT_EOK) { rt_kprintf("open device failed!"); return; } while(1) { /* 从传感器读取一个数据 */ res = rt_device_read(dev, 0, &data, 1); if (1 != res) { rt_kprintf("read data failed!size is %d", res); } else { rt_kprintf("light:%4d.%d lux\n", data.data.light / 10, data.data.light % 10); } rt_thread_mdelay(1000); } } int bh1750_example(void) { rt_thread_t tid; /* 线程句柄 */ tid = rt_thread_create("bh1750_thread", bh1750_thread_entry, RT_NULL, 1024, 20, 10); if(tid != RT_NULL) { /* 线程创建成功,启动线程 */ rt_thread_startup(tid); } return 0; } /* 导出到 msh 命令列表中 */ MSH_CMD_EXPORT(bh1750_example, bh1750 example);运行结果:

使用RT-Thread提供给我的I/O设备管理接口rt_device_find、rt_device_open、rt_device_read、rt_device_close来编写应用。相关框图:

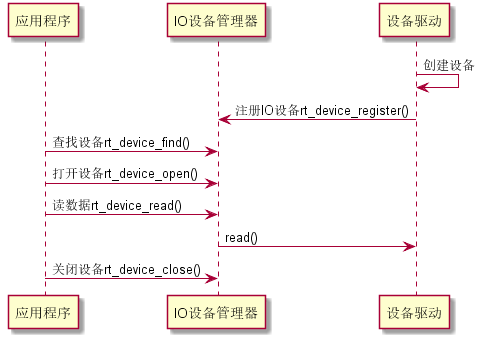

关于RT-Thread的I/O设备模型可查看往期笔记:
以上就是本次的分享,如有错误,欢迎指出!
我的个人博客:https://www.lizhengnian.cn/
我的微信公众号:嵌入式大杂烩
我的CSDN博客:https://blog.csdn.net/zhengnianli
