
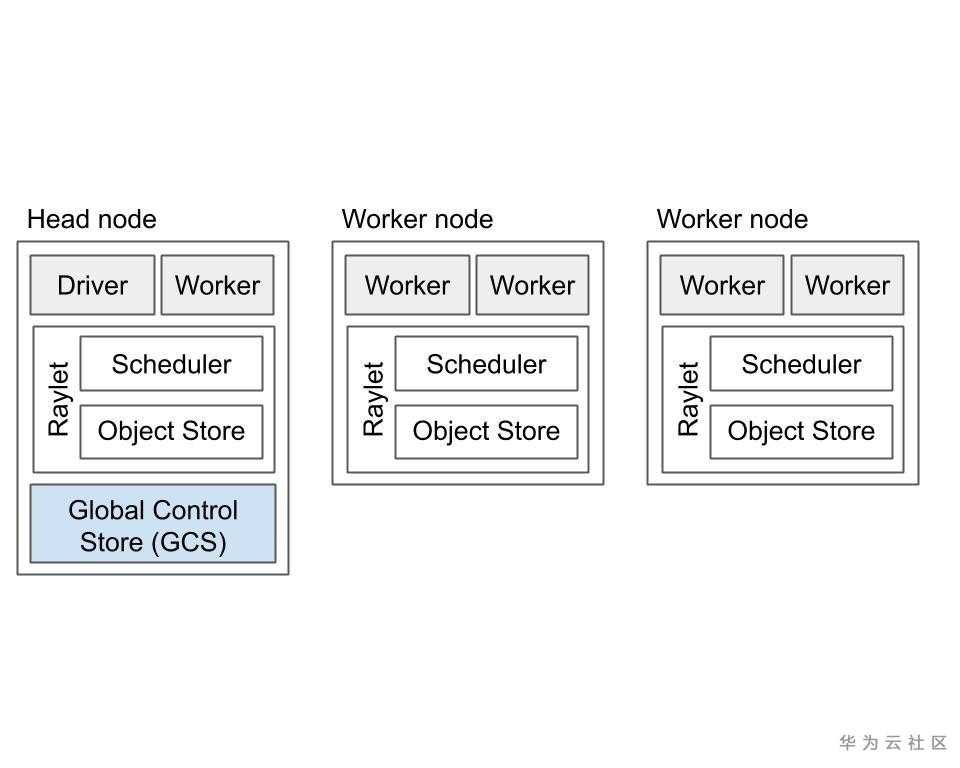
如上图所示,Ray集群包括一组同类的worker节点和一个集中的全局控制存储(GCS)实例。
部分系统元数据由GCS管理,GCS是基于可插拔数据存储的服务,这些元数据也由worker本地缓存,例如Actor的地址。 GCS管理的元数据访问频率较低,但可能被群集中的大多数或所有worker使用,例如,群集的当前节点成员身份。这是为了确保GCS性能对于应用程序性能影响不大。
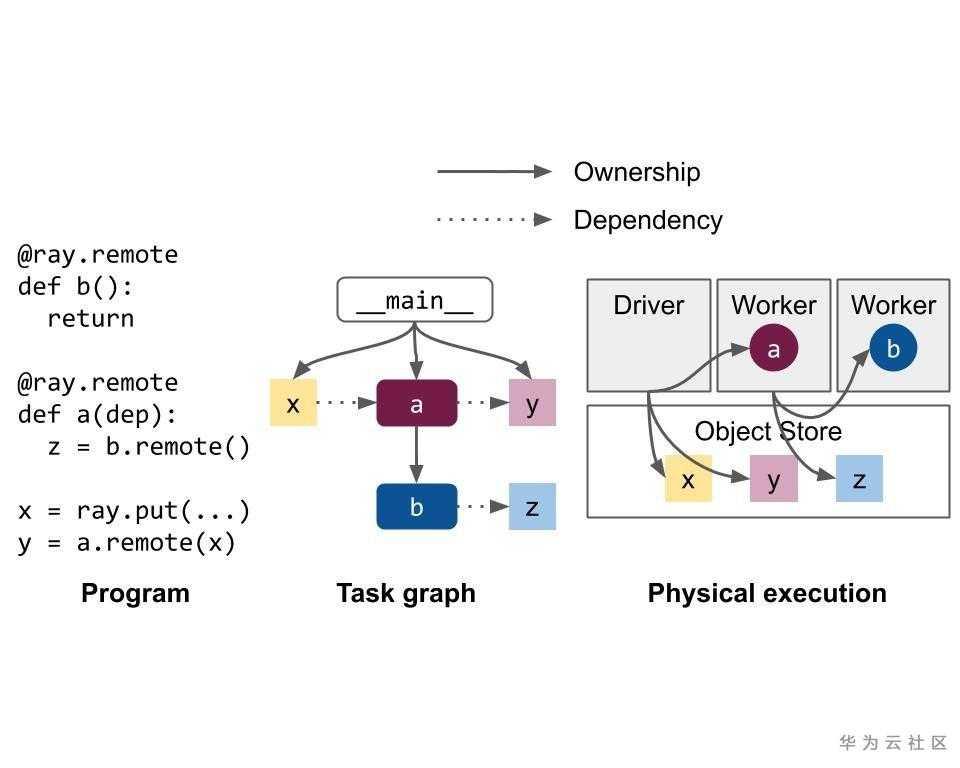
大部分系统元数据是根据去中心化理念(ownership)进行管理的:每个工作进程都管理和拥有它提交的任务以及这些任务返回的“ ObjectRef”。Owner负责确保任务的执行并促进将ObjectRef解析为其基础值。类似地,worker拥有通过“ ray.put”调用创建的任何对象。
OwnerShip的设计具有以下优点(与Ray版本<0.8中使用的更集中的设计相比):
低任务延迟(〜1 RTT,<200us)。经常访问的系统元数据对于必须对其进行更新的过程而言是本地的。
高吞吐量(每个客户端约10k任务/秒;线性扩展到集群中数百万个任务/秒),因为系统元数据通过嵌套的远程函数调用自然分布在多个worker进程中。
简化的架构。owner集中了安全垃圾收集对象和系统元数据所需的逻辑。
提高了可靠性。可以根据应用程序结构将工作程序故障彼此隔离,例如,一个远程调用的故障不会影响另一个。
OwnerShip附带的一些权衡取舍是:
要解析“ ObjectRef”,对象的owner必须是可及的。这意味着对象必须与其owner绑定。有关对象恢复和持久性的更多信息,请参见object故障和object溢出。
目前无法转让ownership。
核心组件
Ray实例由一个或多个工作节点组成,每个工作节点由以下物理进程组成:
一个或多个工作进程,负责任务的提交和执行。工作进程要么是无状态的(可以执行任何@ray.remote函数),要么是Actor(只能根据其@ray.remote类执行方法)。每个worker进程都与特定的作业关联。初始工作线程的默认数量等于计算机上的CPU数量。每个worker存储ownership表和小对象:
a. Ownership 表。工作线程具有引用的对象的系统元数据,例如,用于存储引用计数。
b. in-process store,用于存储小对象。
Raylet。raylet在同一群集上的所有作业之间共享。raylet有两个主线程:
a. 调度器。负责资源管理和满足存储在分布式对象存储中的任务参数。群集中的单个调度程序包括Ray分布式调度程序。
b. 共享内存对象存储(也称为Plasma Object Store)。负责存储和传输大型对象。集群中的单个对象存储包括Ray分布式对象存储。
每个工作进程和raylet都被分配了一个唯一的20字节标识符以及一个IP地址和端口。相同的地址和端口可以被后续组件重用(例如,如果以前的工作进程死亡),但唯一ID永远不会被重用(即,它们在进程死亡时被标记为墓碑)。工作进程与其本地raylet进程共享命运。
其中一个工作节点被指定为Head节点。除了上述进程外,Head节点还托管:
全局控制存储(GCS)。GCS是一个键值服务器,包含系统级元数据,如对象和参与者的位置。GCS目前还不支持高可用,后续版本中GCS可以在任何和多个节点上运行,而不是指定的头节点上运行。
Driver进程(es)。Driver是一个特殊的工作进程,它执行顶级应用程序(例如,Python中的__main__)。它可以提交任务,但不能执行任何任务本身。Driver进程可以在任何节点上运行。
交互设计应用的Driver可以通过以下方式之一连接到Ray:
调用`ray.init()’,没有参数。这将启动一个嵌入式单节点Ray实例,应用可以立即使用该实例。