
首先是空回滚。什么是空回滚?空回滚就是对于一个分布式事务,在没有调用 TCC 资源 Try 方法的情况下,调用了二阶段的 Cancel 方法,Cancel 方法需要识别出这是一个空回滚,然后直接返回成
什么样的情形会造成空回滚呢?可以看图中的第 2 步,前面讲过,注册分支事务是在调用 RPC 时,Seata 框架的切面会拦截到该次调用请求,先向 TC 注册一个分支事务,然后才去执行 RPC 调用逻辑。如果 RPC 调用逻辑有问题,比如调用方机器宕机、网络异常,都会造成 RPC 调用失败,即未执行 Try 方法。但是分布式事务已经开启了,需要推进到终态,因此,TC 会回调参与者二阶段 Cancel 接口,从而形成空回滚。
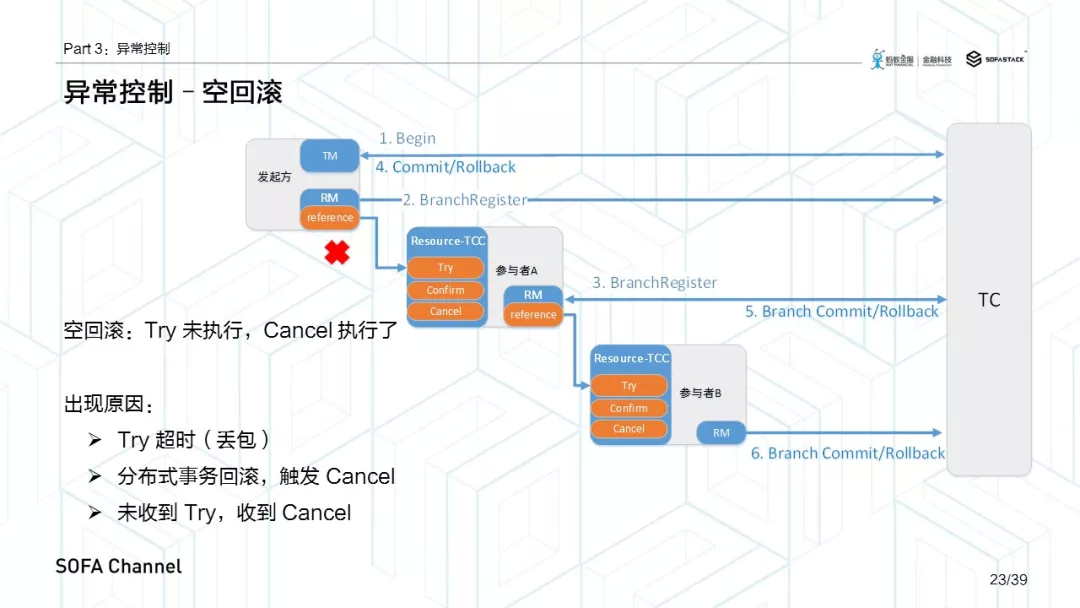
那会不会有空提交呢?理论上来说不会的,如果调用方宕机,那分布式事务默认是回滚的。如果是网络异常,那 RPC 调用失败,发起方应该通知 TC 回滚分布式事务,这里可以看出为什么是理论上的,就是说发起方可以在 RPC 调用失败的情况下依然通知 TC 提交,这时就会发生空提交,这种情况要么是编码问题,要么开发同学明确知道需要这样做。
那怎么解决空回滚呢?前面提到,Cancel 要识别出空回滚,直接返回成功。那关键就是要识别出这个空回滚。思路很简单就是需要知道一阶段是否执行,如果执行了,那就是正常回滚;如果没执行,那就是空回滚。因此,需要一张额外的事务控制表,其中有分布式事务 ID 和分支事务 ID,第一阶段 Try 方法里会插入一条记录,表示一阶段执行了。Cancel 接口里读取该记录,如果该记录存在,则正常回滚;如果该记录不存在,则是空回滚。
TCC设计 - 幂等控制接下来是幂等。幂等就是对于同一个分布式事务的同一个分支事务,重复去调用该分支事务的第二阶段接口,因此,要求 TCC 的二阶段 Confirm 和 Cancel 接口保证幂等,不会重复使用或者释放资源。如果幂等控制没有做好,很有可能导致资损等严重问题。
什么样的情形会造成重复提交或回滚?从图中可以看到,提交或回滚是一次 TC 到参与者的网络调用。因此,网络故障、参与者宕机等都有可能造成参与者 TCC 资源实际执行了二阶段防范,但是 TC 没有收到返回结果的情况,这时,TC 就会重复调用,直至调用成功,整个分布式事务结束。
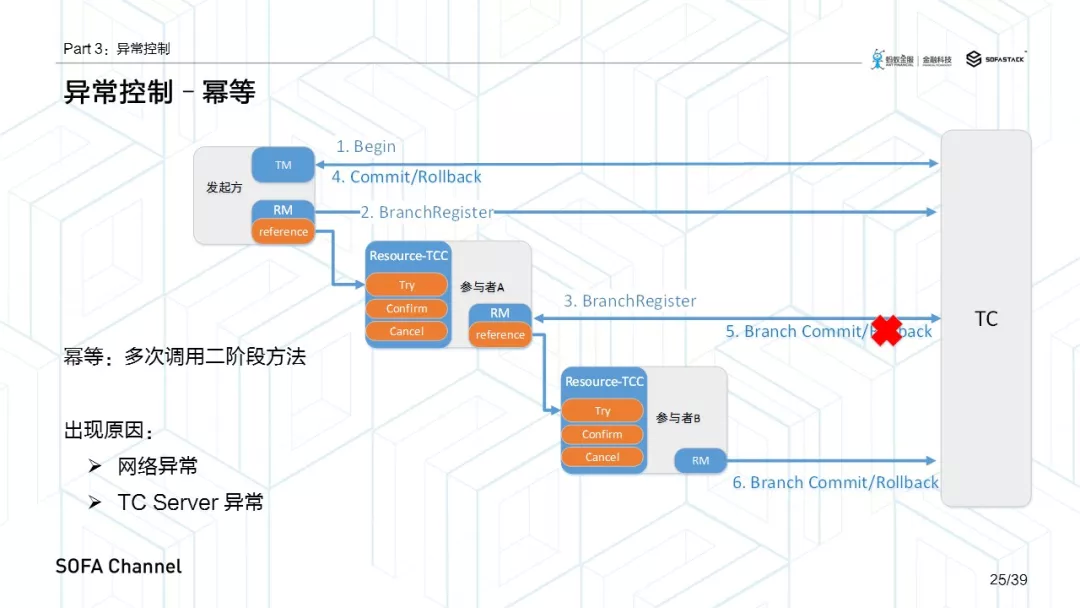
怎么解决重复执行的幂等问题呢?一个简单的思路就是记录每个分支事务的执行状态。在执行前状态,如果已执行,那就不再执行;否则,正常执行。前面在讲空回滚的时候,已经有一张事务控制表了,事务控制表的每条记录关联一个分支事务,那我们完全可以在这张事务控制表上加一个状态字段,用来记录每个分支事务的执行状态。
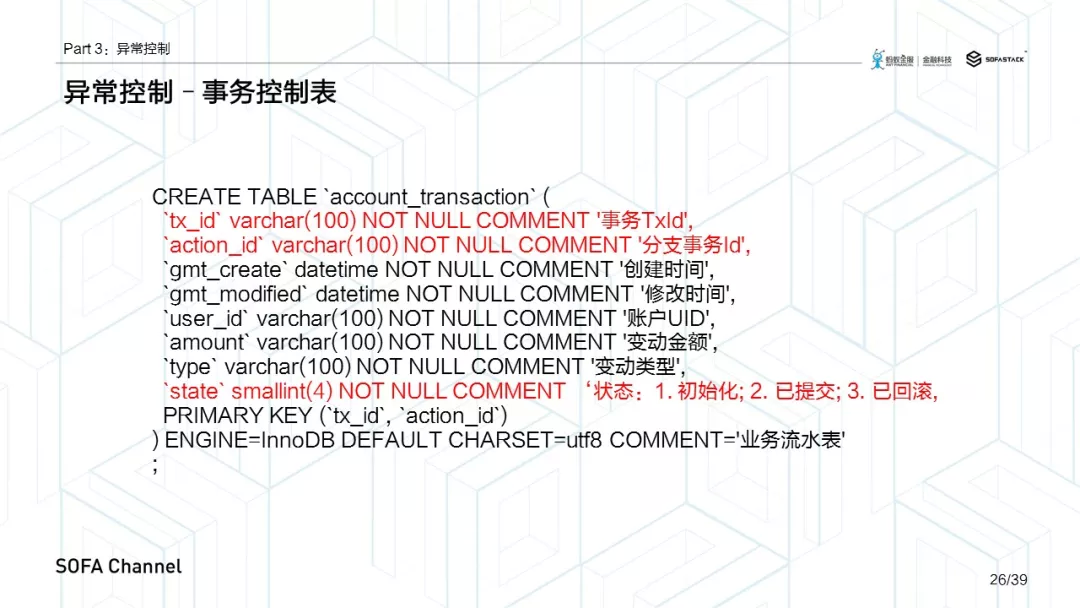
如图所示,该状态字段有三个值,分别是初始化、已提交、已回滚。Try 方法插入时,是初始化状态。二阶段 Confirm 和 Cancel 方法执行后修改为已提交或已回滚状态。当重复调用二阶段接口时,先获取该事务控制表对应记录,检查状态,如果已执行,则直接返回成功;否则正常执行。
TCC设计 - 防悬挂最后是防悬挂。按照惯例,咱们来先讲讲什么是悬挂。悬挂就是对于一个分布式事务,其二阶段 Cancel 接口比 Try 接口先执行。因为允许空回滚的原因,Cancel 接口认为 Try 接口没执行,空回滚直接返回成功,对于 Seata 框架来说,认为分布式事务的二阶段接口已经执行成功,整个分布式事务就结束了。但是这之后 Try 方法才真正开始执行,预留业务资源,前面提到事务并发控制的业务加锁,对于一个 Try 方法预留的业务资源,只有该分布式事务才能使用,然而 Seata 框架认为该分布式事务已经结束,也就是说,当出现这种情况时,该分布式事务第一阶段预留的业务资源就再也没有人能够处理了,对于这种情况,我们就称为悬挂,即业务资源预留后没法继续处理。