
Neuralink设计和生产了超过20种不同类型的线和电极,宽度从5μm到50μm不等,厚度一般为4-6μm——包含了三层绝缘层和两层导通层,长度大约为20mm。上面展示的是其中两种。每根线顶端是16x50μm²的一个圈,是为了让“缝纫机”针头“引线”的。另外还有针对较小的几何表面积,增加有效电荷负载能力,采用PEDOT:PSS和氧化铱也都是个中生产的细节。
实际上微型探针技术并不新鲜,只不过为了较高的生物兼容性、安全性和长期持续性,大部分方案的探针阵列都会用刚性金属。刚性金属阵列是为了直接穿刺到大脑内。不过这样一来,探针和脑组织的抗弯曲刚度、弹性模量无法匹配,可能会导致免疫反应——这就会限制方案的可持续性和功能。而且这类技术的插入阵列几何形状是相对固定的,这样的话就会限制神经元数量的访问,而且还需要考虑到大脑中的血管分布。
那么Neuralink的这种“柔性”线又怎么直接插到大脑里面呢?显然它不够硬,所以就需要有个专门负责插线的装置来做这件事。这也是Neuralink开发“缝纫机”的原因。有关“缝纫机”本体,也就是所谓的神经外科机器人,这部分应该是Neuralink的核心技能,所以Neuralink专门用一篇paper来描述这台设备。
“缝纫机”机器人本尊
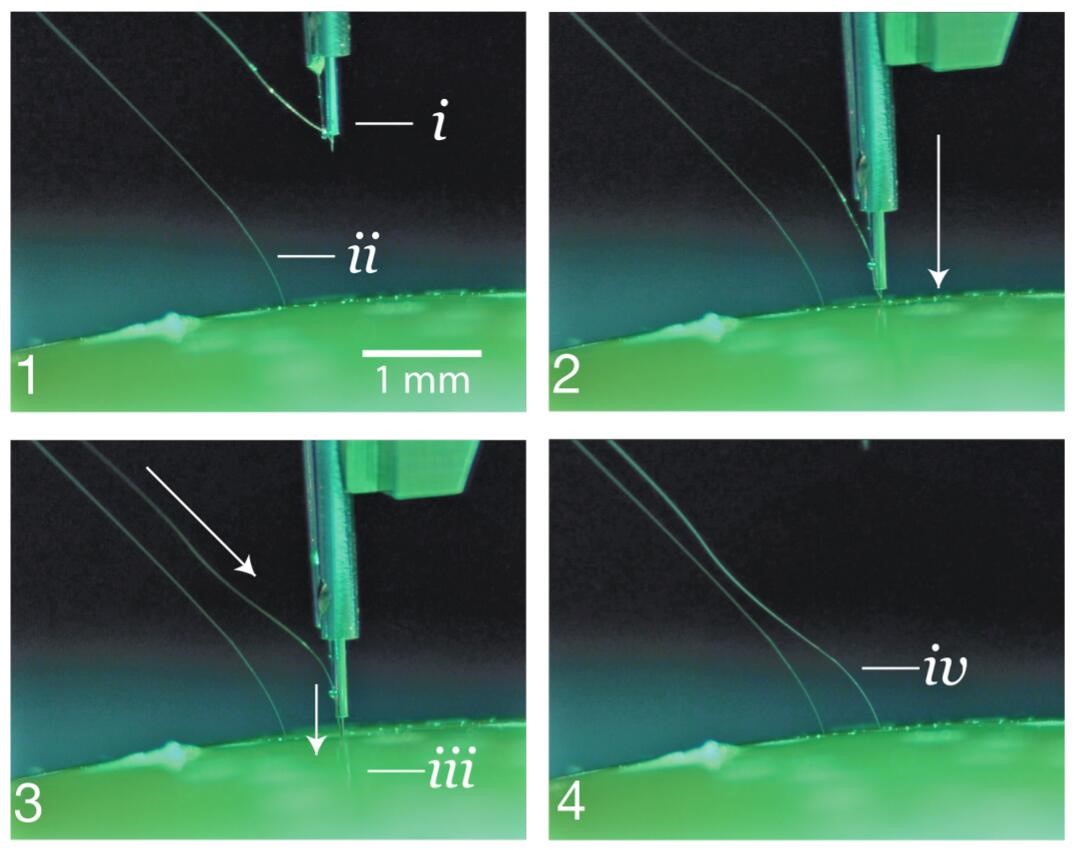
这台外科手术机器人的一个重要优势在于效率比较高,就是“缝纫”速度比较快,每分钟可以植入6根线,每根线的精度也是微米级别的。
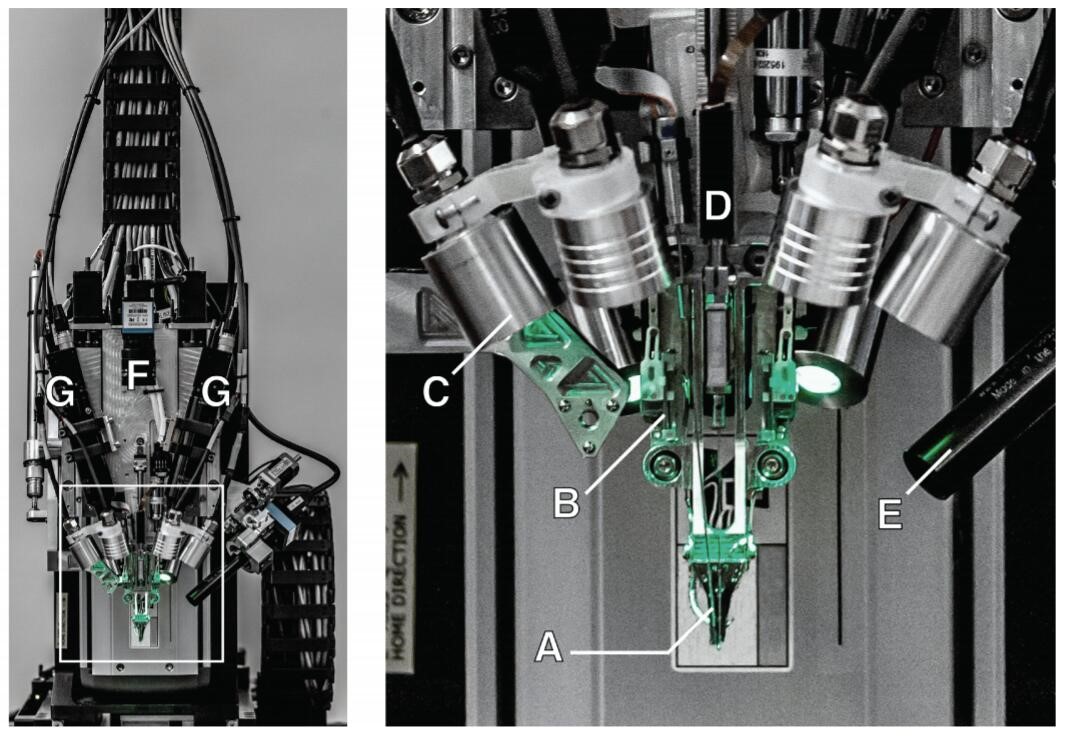
头部位置实际能够达到的精度为10μm,三轴范围内达到的运动行程在400x400x150mm内,负责插线工作的部分实际包含了一个插针(needle)和一个折叠的装置(pincher)。插针直径从40μm到24μm不等。Pincher则是个50μm的钨丝——顶部位置弯曲。Pincher的作用是在传递过程中为为探针提供支持,另外也确保线会沿着探针路径插入。
这台机器人的核心技术在于,头部位置有一个成像系统,引导插针进到线材头部的环中,还有目标确认等作用。头部包含了6个独立的光模块,分别都能独立发出405nm、525nm和650nm或白光,这些都是用于插针各种微米级定位操作的。还有集成的软件能够规划插入路径,并且确保线不会纠缠或者过紧。全套的这种计算机视觉系统,还能避开大脑表面的血管,把线插进。
另外就是不仅支持自动化操作,而且也可以由医生来全手动操作进行微调。从数据来看,Neuralink总共用它执行了19次手术操作,植入成功率在87.1±12.6%,好像问题还比较大。
即将应用到人类身上?前面看到的只是针对实验鼠的一套解决方案,未来如果真正应用到人脑,接线数量和处理算力预计还将增加。Neuralink表示,目前采用USB口连接外部系统的方式未来会改为无线通讯;此外外科手术需要在头盖骨上钻孔,这会让人感觉到不爽,未来期望能用激光束穿透头盖骨,只打小孔。这是对技术的一些展望。
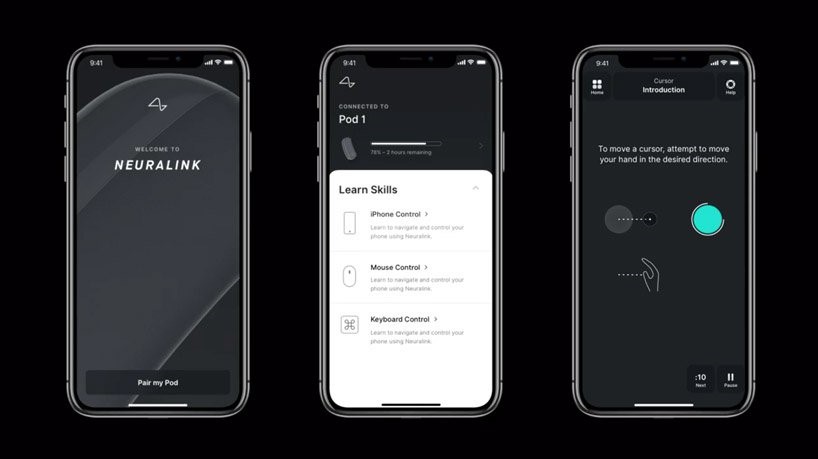
传说中通过iPhone来远程控制
不管前面这些你有没有看明白,至少从原理上来看,Neuralink的脑机接口技术在这样的分析过后就已经不神秘了,也没那么玄幻。毕竟目前的技术阶段还比较低层级,即便只考虑将其应用于医疗,也有不少需要解决的问题。
索尔科生物研究所(Salk Institute for Biological Studies)教授Terry Sejnowski表示,Neuralink柔性线很有价值,但研究人员需要证明这种线材在大脑环境中的耐久性。另外很多学者都认为,Neuralink的研究paper缺乏一些关键数据。Neuralink方面则表示正在进行相关实验,但暂时不会公布包括长期使用稳定性在内的数据。
Musk宣称计划明年二季度将技术放到人体进行实验,当然他们还需要获得FDA批准。但有部分科学家表示实验室针对动物的研究结果很可能无法成功转移到人身上。霍华德休斯医学研究所(Howard Hughes Medical Institute)高级研究员Tim Harris说:“如果这项技术要用到人身上,至少再等个5年。这个复杂程度的植入手术,一两年是不够的。”