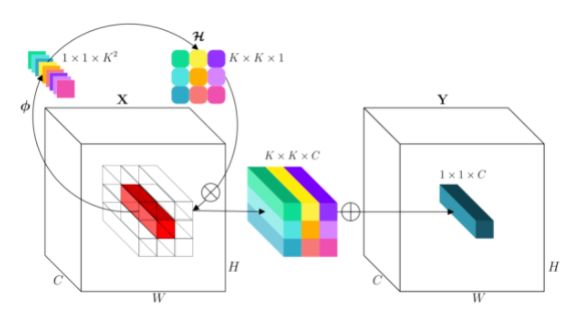
针对输入feature map的一个坐标点上的特征向量,先通过 ∅ (FC-BN-ReLU-FC)和reshape (channel-to-space)变换展开成kernel的形状,从而得到这个坐标点上对应的involution kernel,再和输入feature map上这个坐标点邻域的特征向量进行Multiply-Add得到最终输出的feature map。具体操作流程和tensor形状变化如下:

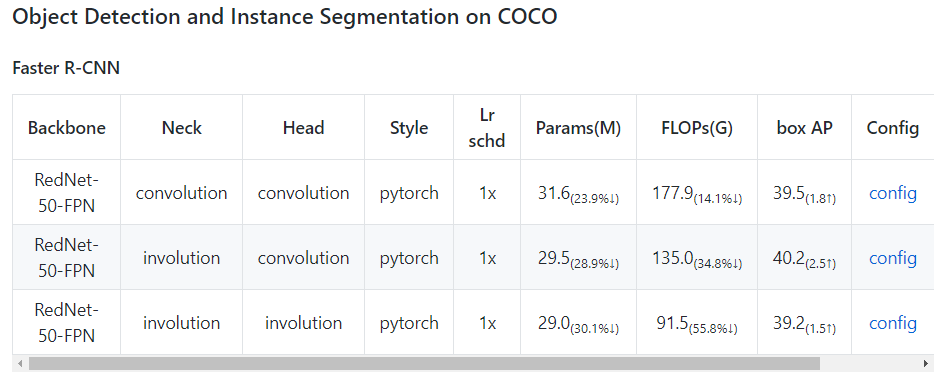
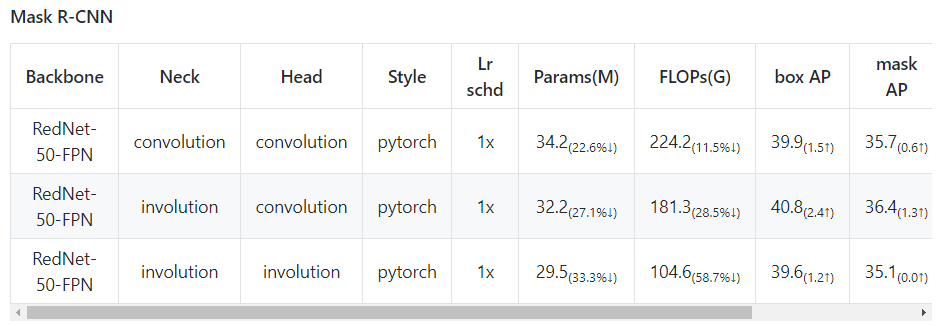
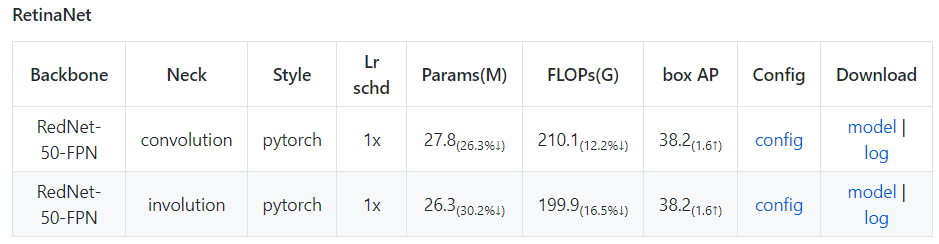
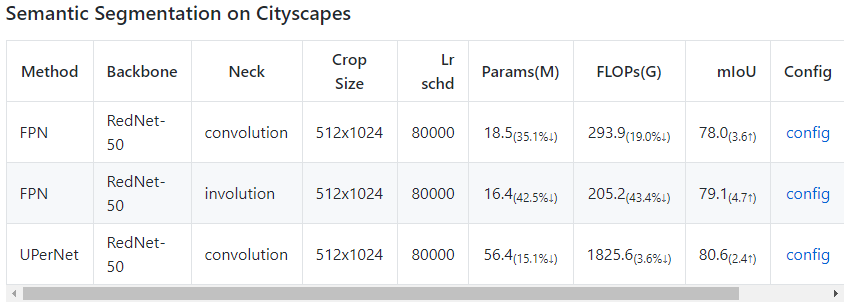
另外作者基于MM系列代码,实现了mmclassficton、mmsegmentation、mmdetection中的部分模型。